Axis controller
Preambule
WRSimulator allows the insertion of axis controllers into folios. The simulated axis controller provides a limited emulation of the IAI SCONS2 axis controller. (SCON2-CE0401-1.1A.pdf)
The example us43-demo_controller_axis_CODESYS.xrs demonstrates the implementation of an IAI-SCON2 axis controller for controlling the positioning of a lifting table.
CODESYS axis controller simulation

Quick description
- The CODESYS ControlWin 64 virtual PLC is connected to the axis controller simulated by WRSimulateur via Modbus TCP-IP
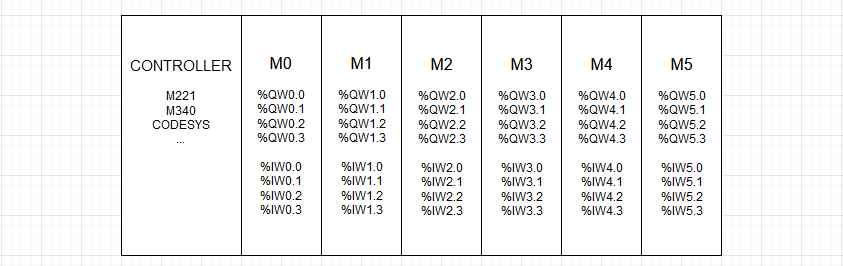
- The interaction between the PLC and the controller is handled through an exchange table consisting of 5 words (e.g., %QW5.0 to %QW5.2 and %IW5.0 to %IW5.1 in this example).
- The program in the project us43-demo_controller_axis_CODESYS.project adjusts the control bits of the axis_ctrl register in the controller based on the state of the buttons connected to its inputs.
- The speed and setpoint are set by the program (lines 9 and 10 of the program below).
- You can test the behavior of the mobile table positioning by forcing values in the axis_setpoint and axis_speed registers.
- The axis controller includes a PID position control loop. The PID gains (Kp, Ki, Kd) are tunable via the Kp, Ki, and Kd buttons.
- The axis position can be visualized on the plotter (grapher module) using the axis_position.
CODESYS axis controller program

Parameters
The addresses of the PLC words used in the tables below are provided as examples. Different addresses can be selected in the virtual PLC mapping.
| Default parameter | Description |
|---|---|
| In = 10 A | Axis Controller caliber |
| axis_ctrl = %QW5.0 | Control bits |
| axis_setpoint = %QW5.1 | Position setpoint |
| axis_speed = %QW5.2 | Axis movement speed in % |
| axis_status = %IW5.0 | Axis controller status |
| axis_position = %IW5.1 | Axis position (%) |
| home_point = 0 mm | Home position value (mm) |
| max_position = 700 mm | Max position value (mm) |
| axis_ctrl | Bit descriptions |
|---|---|
| set servo (%QW5_0.0) | Enables the axis controller operation [False,True] |
| stop move (%QW5_0.1) | Stop motion request [False,True] |
| goto home (%QW5_0.2) | Requests return to home position [False,True] |
| goto setpoint (%QW5_0.3) | Requests positioning to setpoint [False,True] |
| raz default (%QW5_0.4) | Requests fault reset (overload) [False,True] |
| axis_status | Bit descriptions |
|---|---|
| setpoint_reached (%IW5.0) | Setpoint position reached [False,True] |
| homepoint_reached (%IW5.1) | Home position reached [False,True] |